LINE TRACER MIKRO
DESKRIPSI
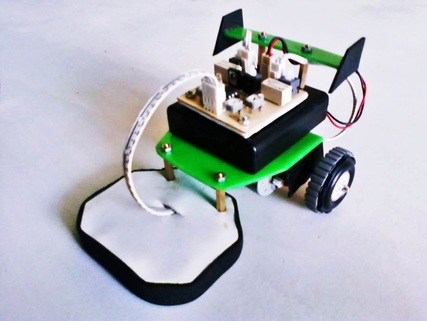
Line Tracer Mikro adalah sebuah robot yang dapat mengikuti garis yang didukung oleh rangkain komponen elektronika yang dilengkapi dengan roda dan digerakan oleh motor. Pengendalian kecepatan sangat bergantung pada batas putaran dan pergesekan antara ban robot dengan lantainya. Robot tersebut dirancang untuk bernavigasi dan bergerak secara otomatis mengikuti sebuah alur garis yang dibuat. Untuk membaca garis, robot dilengkapi dengan sensor optik yang diletakkkan diujung depan dari robot tersebut. Line tracer mikro ini memiliki jenis dan bentuk serta memiliki beberapa sistem penggerak dan pengendali sebagai pengatur kinerja yang beraneka ragam sesuai dengan kreatifitas pembuatnya. Pada perancangan proyek line follower robot kali ini akan dibahas dan dianalisi lebih dalam terhadap faktor suatu kecepatan robot dengan gerkannya yang dikontrol oleh pengendali Proportional Integral Derivative (PID) sehingga gerakan robot dapat dinamis sesuai dengan track yang akan diujikan
Lomba Line Tracer Mikro IARC 2013 menguji keahlian dan kecerdasan setiap peserta untuk menyelesaikan lintasan dari masing-masing tahapan yang telah dirancang oleh panitia. Selain keandalan dari Line Tracer Mikro, kecerdasan algoritma yang di programkan ke Line Tracer Mikro juga berpengaruh besar dalam mencapai juara.
Info lebih lanjut hubungi :
DOWNLOAD
Lintasan / Track Line Tracer
Aturan Lomba Line Tracer Mikro
RUNDOWN LOMBA LINE TRACER MIKRO (SABTU)
MIRROR DOWNLOAD
Line Tracer Mikro adalah sebuah robot yang dapat mengikuti garis yang didukung oleh rangkain komponen elektronika yang dilengkapi dengan roda dan digerakan oleh motor. Pengendalian kecepatan sangat bergantung pada batas putaran dan pergesekan antara ban robot dengan lantainya. Robot tersebut dirancang untuk bernavigasi dan bergerak secara otomatis mengikuti sebuah alur garis yang dibuat. Untuk membaca garis, robot dilengkapi dengan sensor optik yang diletakkkan diujung depan dari robot tersebut. Line tracer mikro ini memiliki jenis dan bentuk serta memiliki beberapa sistem penggerak dan pengendali sebagai pengatur kinerja yang beraneka ragam sesuai dengan kreatifitas pembuatnya. Pada perancangan proyek line follower robot kali ini akan dibahas dan dianalisi lebih dalam terhadap faktor suatu kecepatan robot dengan gerkannya yang dikontrol oleh pengendali Proportional Integral Derivative (PID) sehingga gerakan robot dapat dinamis sesuai dengan track yang akan diujikan
Lomba Line Tracer Mikro IARC 2013 menguji keahlian dan kecerdasan setiap peserta untuk menyelesaikan lintasan dari masing-masing tahapan yang telah dirancang oleh panitia. Selain keandalan dari Line Tracer Mikro, kecerdasan algoritma yang di programkan ke Line Tracer Mikro juga berpengaruh besar dalam mencapai juara.
Info lebih lanjut hubungi :
- ARIQ (08983334414)
DOWNLOAD
Lintasan / Track Line Tracer
Aturan Lomba Line Tracer Mikro
RUNDOWN LOMBA LINE TRACER MIKRO (SABTU)
MIRROR DOWNLOAD
| Lintasan / Track Line Trace mikro.pdf |
